Chassis and arm completed
This week we completed the chassis and installed the drive trains. Micheal built a prototype of our robots arm and added a base for it. I tested all the motors and batteries to ensure that are functional before we progress. Wheels have been installed, and with a test brain, we saw that our robot can move in a straight line with the speed we had hoped to reach to be successful at our challenge. We did not get as far as we planned at the beginning of the week, however, we did achieve the majority of our goals.
 |
| Arm prototype |
 |
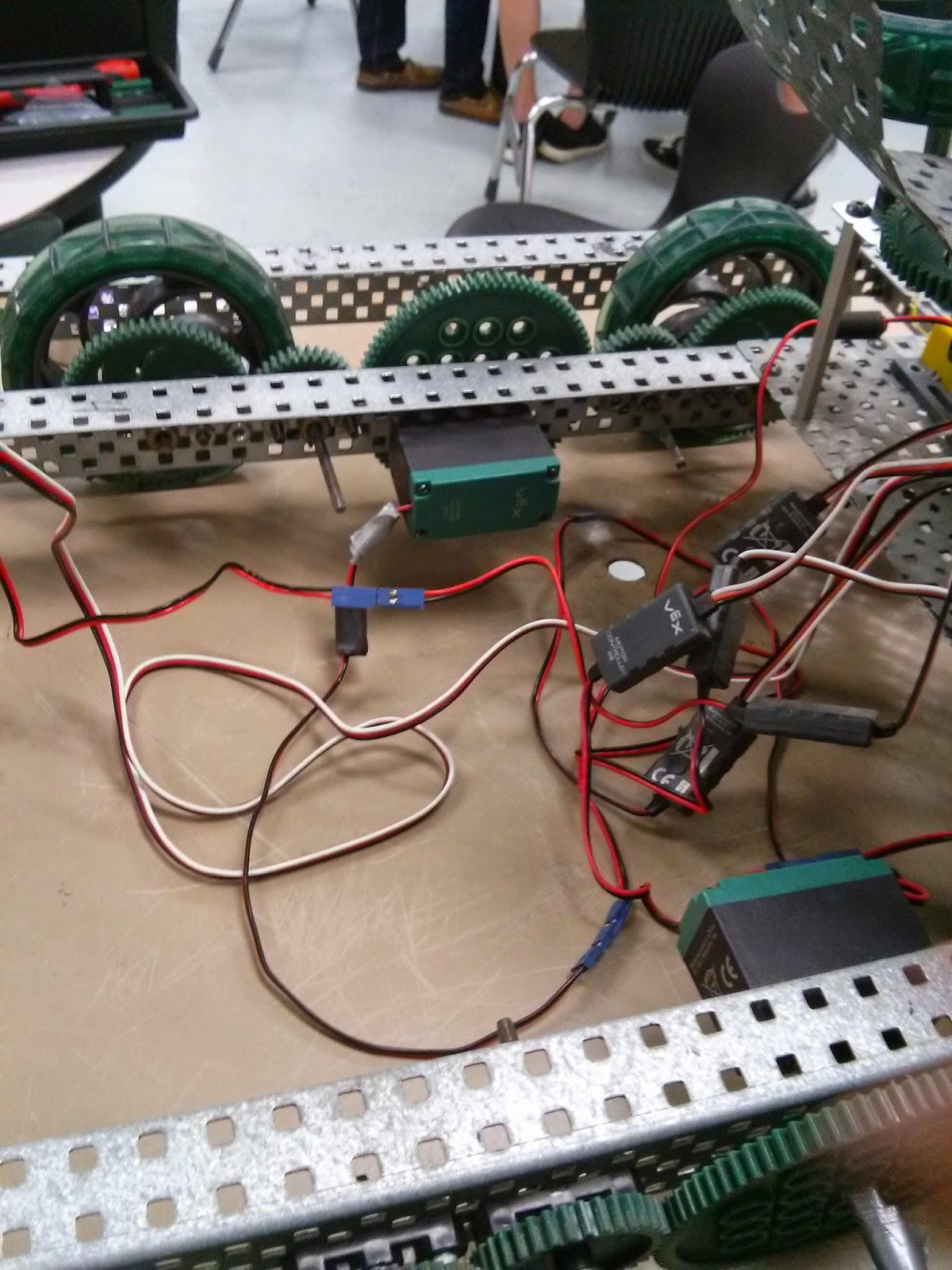
| Completed chassis. |


















.jpg)











.jpg)












.JPG)
.JPG)

